
Objective :
Implementation of DC motor speed-torque characteristics.
Introduction:
Electric vehicles are widely used for transportation purposes. These vehicles use motors to get mechanical energy from electrical energy provided by batteries.
Speed and torque are two major parameters to select a motor for an electrical vehicle because maintaining both at a particular load is important. There are different motors available in the market for this purpose like: Induction Motor, PMSM motor, BLDC Motor etc..
DC motors are widely used for different applications in domestic as well as industrial puspose.
And now these are widely used in EV. Their performance and characteristic draws the minds of electrical vehicle engineers for converting electrical energy into mechanical energy. So for this purpose speed- torque characteristic is plotted by using MATLAB software.
Involved technologies:
DC motors are used for converting electrical energy into mechanical energy. These motors take DC supply from source and provide output.
Construction:
- There are two types of Winding in it:
- Field winding: To generate necessary flux
- Armature winding: To generate armature EMF or torque.
- Stator which is the stationary part of the machine, consists of field winding and the rotor, which is the rotating part, consists of armature winding.
- Stator is made up of soft iron poles, while the rotor is made up of silicon steel lamination.
- Commutator is the part of the motor which provides the commutation process.
- Brushes are used to connect stationary supplies with rotating commutators.
Working:
DC motors work on Faraday’s law of electromagnetic induction, which states that “when a current carrying conductor is placed inside a magnetic field then it experiences a force on it”.
F=BIL Where B = Magnetic field density
I = Current from conductor
L = Length of conductor
Due to this force, torque is produced on the rotor which rotates the rotor. Fleming’s left hand rule provides the direction of motor rotation.
There are two types of DC motors according to the excitation of the field winding of the motor.
- Separately Excited: Field is excited separately by DC source.
- Self excited: Field is excited by some amount of armature current.
Self excited is divided into three major types:
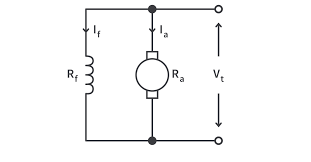
- Shunt motor: Field is in parallel with armature winding.
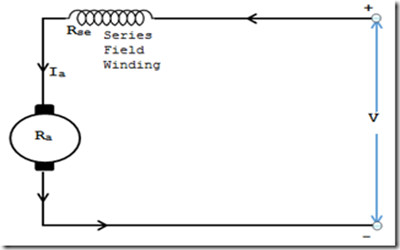
- Series motor: Field is in series with armature winding.
- Compound motor: It contains both shunt and series field winding.
Shunt Series
Characteristics and applications of all these types of motor are different.
- DC shunt motors are used for constant speed due to the constant flux.
- Dc series motors are used for high starting torque applications, because the field is connected in series with the armature.
- DC compounds are used for both constant and high torque applications.
Back EMF of motor (Eb):
An emf is induced inside the armature conductors due to the generation action in motors. This emf is known as back emf.
Eb = NPφZ/60A
Eb = V – IaRa
In DC motors as load is increased, armature current increases, so torque developed also increases,
T ∝ φ Ia
In shunt motors speed doesn’t decrease so much due to constant flux from no load to full load.
But in series motors speed is inversely proportional to torque due to series field winding flux..
N ∝ Eb /φ
Software :
MATLAB Software is used to make characteristics of DC motors. MATLAB is programming software which is used to analyze data, Simulink models, make algorithms and others.
In this project characteristics are drawn by using script files.
clc
%Input variables for DC Machine Torque-speed characteristic
V=input(‘Enter the value of DC input voltage in volt-‘);
Ra=input(‘Enter the value of armature resistance in ohm-‘);
Ia=input(‘Enter the value of armature current in A-‘);
Kt=input(‘Enter the value of torque constant in Nm/A-‘);
Ke=input(‘Enter the value of Vs/rad-‘);
%For deriving Back EMF
Eb= V-Ia*Ra
%For speed variables
N=linspace(0,2000,100);
%Relation between Angular speed (w) and Linear speed(N)
w=(2*3.14*N)/60
%Torque-speed relation of DC machine
T=((Kt*V/Ra)-(Ke*Kt*w)/Ra)
%Speed vs Torque characteristic curve of DC Machine
plot(N,T,‘color’,‘r’);
xlabel(‘speed in RPM’);
ylabel(‘Torque in Nm’);
title(‘speed vs Torque characteristic curve’);
axis([0 2000 0 250]);
The data for input voltage, armature resistance, armature current, torque constant, emf constant is provided according to the motor.
To draw characteristic a DC motor is selected which has following rating:
Supply voltage = 220 V
Armature resistance = 1 ohm
Armature current = 18 Amp
Kt = 1.1
Kv = 1.1
Conclusion:
The best values of Kt and Kv are 1.1. It provides the best characteristic for a motor.
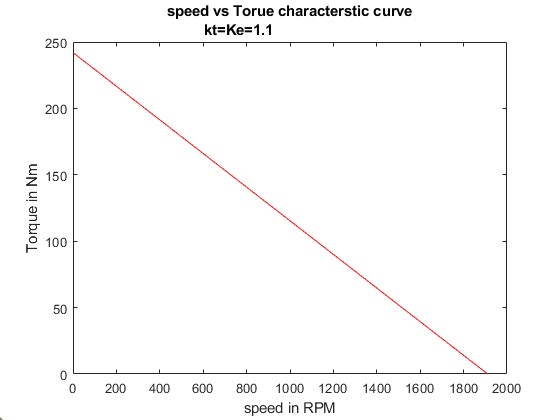
The characteristic shows that at no load, armature current is very less so torque is less but speed is high for motor, but at full load condition, armature current is more due to that full load torque produced, and speed gets decreased. This type of application is best suitable for high starting torque.
0 responses on "DC Motor"